Introduction
La machine synchrone est un convertisseur électromécanique réversible fonctionnant soit en génératrice soit en moteur (moteur synchrone)
Principe de l’alternateur
Si l’on fait un tourner un aimant permanent (inducteur) à la fréquence n , la bobine (induit) est traversée par un flux variable Φ(t) dû à l’aimant d’où la création d’une f.é.m. induite : e (t) = −𝑵𝑺 ![]()
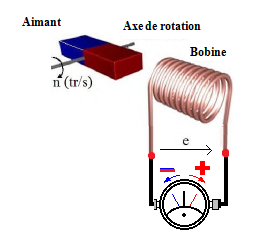
La fréquence de cette f.é.m. est telle que : f = n
Pour Un électro-aimant à p (paire de pôles) et tournant à la vitesse n (tr/s); une fém induit aux bornes de la bobine de fréquence: f =p. n
Constitution
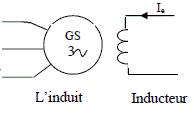
L’alternateur possède deux parties principales : l’inducteur et l’induit.
L’inducteur
L’inducteur est généralement le rotor qui porte des aimants permanents ou un bobinage d’électroaimants parcourus par un courant continu (Ie) appelé courant d’excitation.
L’inducteur porté par le rotor, mis en rotation, crée un champ magnétique tournant.
Il existe 2 types de rotors:
1) Rotor à Pôles lisses p = 1 (2 pôles) p: paire de pôles
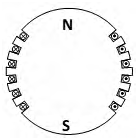
Elles sont utilisées pour les vitesses de rotation élevées.
Exemple : Turbines à vapeurs de centrales nucléaires ou thermiques.
2) Rotor à pôles saillants p = 2 ( 4 pôles)
C’est un électroaimant dont les pôles sont alternativement nord et sud.Les enroulements sont alimentés en courant continu, Le nombre de pôles est toujours pair
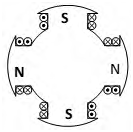
Elles sont utilisées pour les faibles vitesses de rotation. Exemple :Turbines hydrauliques
.
L’induit
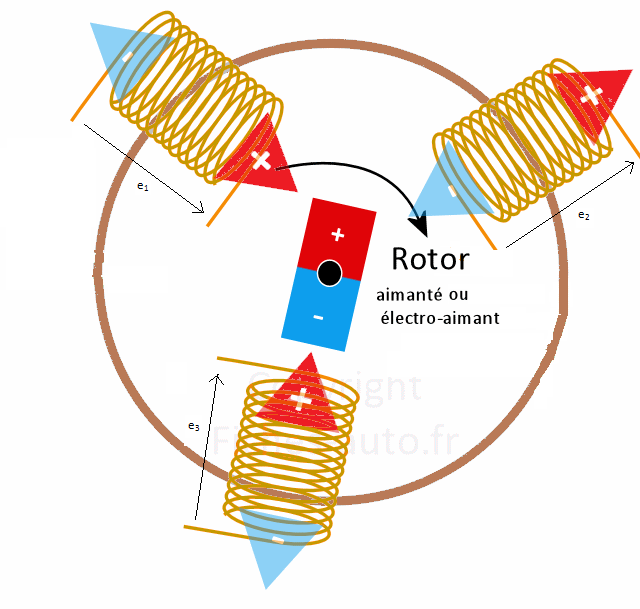
L’induit est la partie fixe de l’alternateur c’est-à-dire le stator. C’est un bobinage triphasé ou monophasé, dont ses conducteurs sont insérés dans les encoches du stator.
Ces enroulements (phases) identiques et fixes sont décalés dans l’espace, l’un par rapport à l’autre
En triphasé : les trois enroulements ou (phases) décalés de 120o. soumis au champ magnétique tournant; de ce fait, ils sont le siège de 3 tensions induites (f.é.m. e1(t), e2 (t) et e3 (t)) qui sont tous identiques mais déphasées dans le temps de 120o. Elles forment un système triphasé équilibré de tensions.
Caractéristiques de l’alternateur
Fréquence des f.e.m. induites
Les 3 tensions des 3 phases qui apparaissent aux bornes des enroulements de l’induit ont une fréquence f telles que : f = p.n
Avec :
- f : fréquence des f.e.m. induites en Hz
- n : fréquence de rotation du champ tournant en tr/s
- p : nombre de paires de pôles de l’inducteur
Valeur efficace de la f.e.m. induite dans un enroulement (dans une phase)
la f.e.m induite générée dans chaque enroulement ( phase) a pour valeur efficace :
E = K.f.N.Φmax = K.p.n.N.Φmax
avec :
- n: la vitesse de rotation du rotor
- p: nombre de paires de pôles de l’inducteur
- K : coefficient de Kapp (dépend de la machine).
- N : nombre de conducteurs d’un enroulement.
- Φmax : flux maximal sous un pôle.
Couplage des alternateurs triphasés
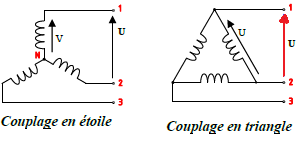
3 enroulements de l’alternateur triphasé sont reliés entre eux. pour constituer 2 types de couplage:
Etoile (Y): qui impose une tension simple à chaque enroulement
Triangle (Δ): qui impose une tension composée à chaque enroulement
Excitation des alternateurs
Lorsque l’inducteur est constitué d’électro-aimants, une alimentation à courant continu est nécessaire, le rotor est relié par un système de bagues et de balais.
Fonctionnement en charge
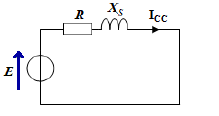
Modèle équivalent d’une phase de l’alternateur
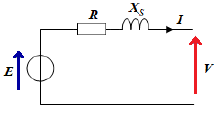
- E: fem. à vide (ou synchrone d’une phase)
- V : Tension entre phase et neutre
- XS : Réactance synchrone d’un enroulement égal à Lw
- R= Résistance d’un enroulement (couplage Y)
Loi des mailles avec les grandeurs complexes : E = V + Z.I = V + (R+jXs).I soit V = E – (R+jXs)*I
Diagramme synchrone
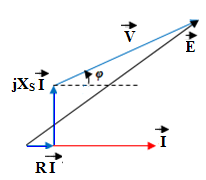
A savoir que le déphasage φ entre le courant et la tension, est imposé par la charge, il varie en fonction de la consommation
Caractéristique électrique V = f (I):
L’entraînement de l’alternateur triphasé est à vitesse constante. L’ alternateur alimente une charge équilibrée. L’intensité Ie du courant d’excitation du rotor est maintenue constante.
Le déphasage tension courant est imposé par la charge.
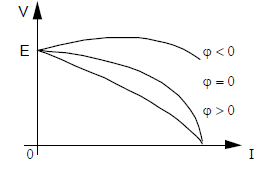
on remarque les chutes de tension importantes, à cause de résistances des enroulements statoriques.
et Réaction Magnétique d’induit
Détermination de la réactance synchrone
On peut déterminer la réactance du modèle électrique équivalent, à l’aide de deux essais :
- Essai à vide: on relève les variations de E en fonction de courant d’excitation Ie E = f(Ie) ;
- Essai en court-circuit : on relève les variations de Icc en fonction de courant d’excitation Ie ICC = f(Ie).
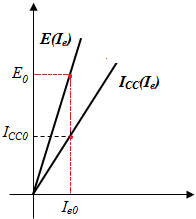
D’après la loi de maille E = Z.ICC d’où ![]()
Pour un courant d’excitation donné Ie0 , on connaît donc : ICC0 et E0, on en déduit XS:
Sachons que : ![]() donc
donc ![]()
Puisque la réactance XS est généralement très grande devant la résistance R d’un enroulement (XS >> R)
alors Z ≈XS d’où XS ≈![]()
Bilan des puissances. Rendement.
Puissance reçue
La puissance reçue par l’alternateur est mécanique, elle est fournie par le moteur d’entraînement et vérifie la relation suivante: PM= CMΩ
Ω : pulsation de rotation en rad.s-1
CM : couple utile sur l’arbre en N.m
Puissance utile
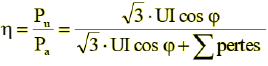
C’est la puissance électrique P qui est reçue par la charge : P = √3 U I cos φ
Pertes de puissance :
Pertes Joule Stator : Pjs = 3/2.R.I2 quel que soit le couplage.
R :résistance mesurée entre phases du stator couplé
Pertes Joule Inducteur: Pje = Ue.Ie
- Ue : la tension continue aux bornes de l’inducteur ;
- Ie : courant continu d’excitation .
Pertes collectives:
- pm :Pertes mécaniques.
- pf : Pertes dans le fer
Puissance total absorbée par l’alternateur : Pa= PM + Pje
Somme des pertes de puissance: ![]() =pm + pf + pje + pjs
=pm + pf + pje + pjs
L’expression du rendement en fonction des différentes pertes de puissance: